Der Lizenzschlüssel wird nur im Digitalmodus mit der Carrera Control Unit benötigt. Im Simulationsmodus oder für die analoge Zeitmessung ist dieser nicht erforderlich.
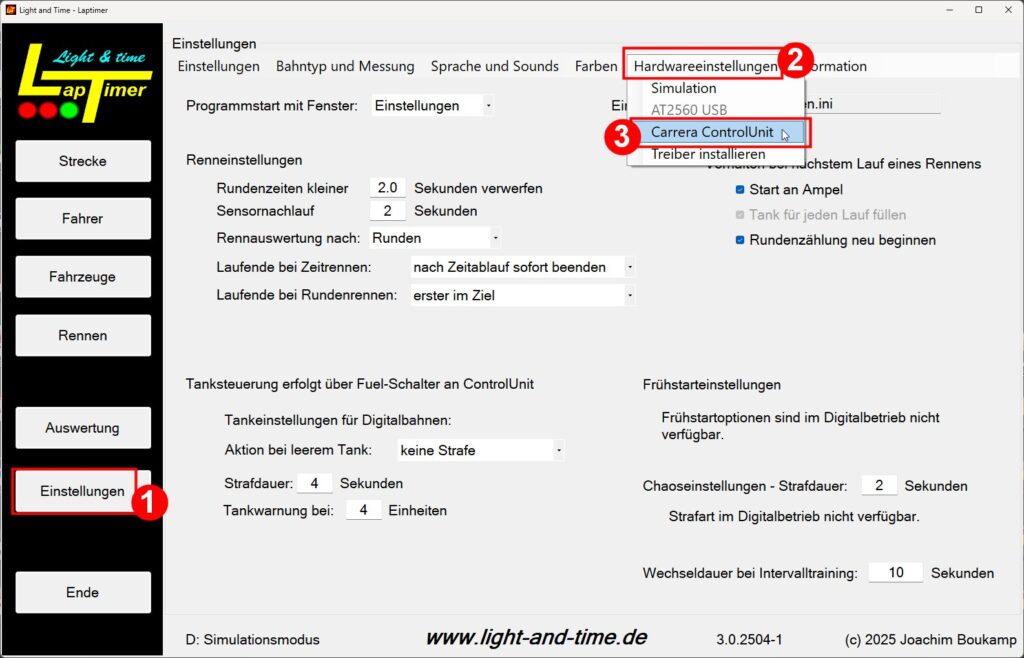
Um den Lizenzschlüssel einzutragen gehe in die „Einstellungen“ (1). Wähle in den Menüleiste oben rechts den Eintrag „Hardwareeinstellungen“ (2) und klicke den Menüpunkt „Carrera Control Unit“ (3) an.
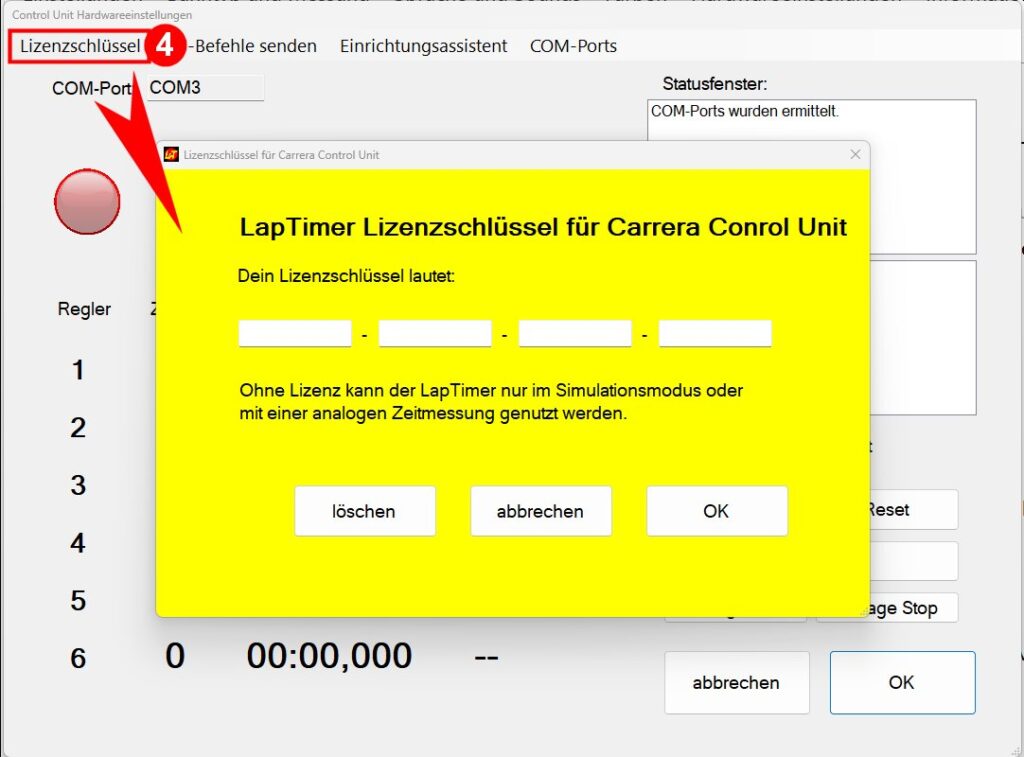
Im neu geöffneten Fenster „Carrera Control Unit Hardwareeinstellungen“ kannst du über den Menüpunkt „Lizenzschlüssel“ (4) das Eingabefenster für den Lizenzschlüssel öffnen und hier den Lizenzschlüssel eingeben.
Ein bereits eingegebener Lizenzschlüssel kann jederzeit auch über dieses Fenster angezeigt und gelöscht werden.
Während der Softwareeinrichtung oder nach der Softwareeinrichtung zeigt sich, das ein oder mehrere Sensoren keinen Sensorkontakt auslösen – eine Unterbrechung des Sensorweges (mit der Hand oder mit einem Fahrzeug) löst keine Rundenzählung aus.
Bei diesem Fehlerbild wird durch einige Sensoren ein Sensorkontakt ausgelöst, bei anderen Sensoren hingegen nicht.
Die Sensoren werden alle vor dem Versand auf Funktionstüchtigkeit geprüft. Daher handelt es sich regelmäßig um eine nicht ganz korrekte Montage oder Einstellung der Sensoren. Aber auch Defekte an Strahler oder Sensor können nicht ganz ausgeschlossen werden. Diese können bspw. durch mechanische Belastungen während der Montage entstehen.
Die häufigste Fehlerursache ist die fehlerhafte Sensorausrichtung. Sollten die nachfolgenden Beschreibungen das Problem nicht lösen, so nehme bitte mit mir Kontakt auf.
Sensoren kalibrieren
Der LapTimer kann mit verschiedenen Sensoren betrieben werden. Diese haben zum Teil unterschiedliche Funktionsweisen. Einige Sensoren geben dauerhaft ein Signal ab, wenn dieser nicht ausgelöst ist. Erst wenn der Sensor ausgelöst wird, wird der Strom unterbrochen und es liegt kein Signal mehr an.
Andere Sensoren funktionieren nach umgekehrten Prinzip, sie geben kein Signal, wenn der Sensorbereich frei ist und erst mit der Auslösung wird ein Signal erzeugt.
Beim jedem Programmstart werden die Sensoren ausgelesen und kalibriert. Der dann vorliegende Zustand (Strom liegt an oder Strom liegt nicht an) wird als Zustand „kein Fahrzeug im Sensorbereich“ eingestellt.
Steht also in diesem Moment ein Fahrzeug im Sensorbereich, dann kommt es zu einer fehlerhaften Kalibrierung und der Sensor zählt „verkehrt“ herum – immer dann wenn kein Fahrzeug im Sensorbereich ist wird eine Runde gezählt, steht ein Fahrzeug im Sensor, so stoppt die Rundenzählung.
Dieses Prinzip spielt auch bei der Sensorjustierung eine Rolle. Ein Programmneustart behebt dieses Problem.
Fehlerbereinigung:
Zu 1.:
Schließe die Einrichtung der Software ohne Justierung der Sensoren ab. Übernehme dabei die vorgeschlagene Sensorbelegung des Einrichtungsdialogs.
Gehe anschließend wie folgt vor:
Prüfe ob in den Einstellungen in der Menüleiste „Bahntyp und Messung“ „Analog: AT2560 USB“ ausgewählt ist.
Öffne in den Einstellungen unter Hardwareeinstellungen den Menüpunkt „AT2560 USB“, es öffnet sich das Fenster „AT2560 USB Hardwareeinstellungen“.
Füge ggf. fehlende Sensoren mit der Standardbelegung hinzu.
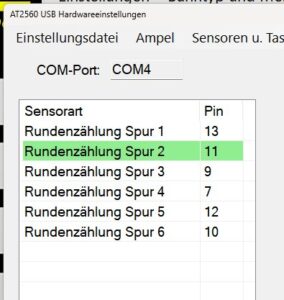
Das Bild zeigt für alle möglichen 6 Spuren die Standardeinstellung. Die tatsächliche Einrichtung und Pinzuweisung kann bei dir jedoch abweichen, da sie diese an der Einbaureihenfolge der Sensoren orientiert.
Löst du die Sensoren jetzt aus, dann sollte der Sensorkontakt dadurch angezeigt werden, dass die Zeile grün hinterlegt wird. Die grüne Markierung wird nach wenigen Augenblicken wieder gelöscht. Im Bild wird eine Sensorauslösung für „Rundenzählung Spur 2“ angezeigt.
technischer Hintergrund: Die Pin-Zuweisung bezieht sich auf die Pin-Nummerierung des verwendeten Atmega-Boards. Die auf dem Board der Zeitmessung verwendeten Eingänge sind durchnummeriert. Um die Zeitmessung möglichst flexibel zu halten ist hier jedem Sensorereignis der korrekte Eingang (Pin) zuzuweisen. D.h. wenn am Eingangspin 13 ein Signal anliegt, dann soll das Programm eine Rundenzählung für Spur 1 durchführen.
Hinweis: Wenn kein Sensor auslöst prüfe zunächst die korrekte COM-Port Zuweisung.
Zu 2.:
Sitzt der Sensor (Empfänger) zu tief in der Schiene, dann erschwert dies die Ausrichtung des Sensors (wie zu 3. beschrieben).
Die dunklen Seitenwände der Bohrung verschlucken dann so viel Licht, dass beim Sensor nicht mehr ausreichend Licht ankommt. Je tiefer der Sensor in der Schiene sitzt, umso genauer muss der Strahler ausgerichtet sein, damit er möglichst gerade von oben auf den Sensor strahlt.
Ideal ist es, wenn die runde Kuppe etwas über die Fahrbahnoberfläche hinausragt. Ist dies aufgrund sehr tief liegender Fahrzeuge nicht möglich, so kann es helfen die Bohrung etwas breiter zu machen, sodass die LED rundum freien Raum hat (bspw. ein 5mm Loch für die 3mm LED).
Zu 3.:
Auch wenn die Sensoren augenscheinlich korrekt ausgerichtet zu sein scheinen ist dies die häufigste Fehlerursache. Es reicht bereits eine geringe Schiefstellung des Sensors aus, um den Sensorkontakt zu verlieren.
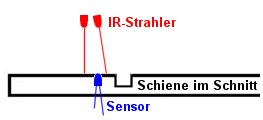
Das Bild zeigt unten in der Schiene in blau den Sensor (Empfängerdiode, 3mm) und darüber zwei fehlerhaft angebrachte IR-Strahler (Senderdiode, 5mm). Die linke Diode ist zu weit nach links versetzt, die rechte Diode wurde schief eingebaut – beide treffen daher im Zentrum nicht den Sensor – der Lichtstrahl ist hier mit der roten Linie angedeutet. Eventuelles Streulicht reicht nicht aus, die Sensoren auszulösen.
Zur Ausrichtung der Sensoren starte das Programm und öffne wie zu 1. das Fenster „AT2560 USB Hardwareeinstellungen“ und teste alle Sensoren, indem du die Hand (oder ein Fahrzeug) zwischen IR-Strahler und Sensor hältst und so den Lichtstrahl unterbrichst. Lösen die Sensoren aus? dann ist alles ok.
Bei einzelnen Sensoren kommt kein Signal? Dann stimmt die Ausrichtung Strahler/Sensor nicht. Bewege den entsprechende IR-Strahler vorsichtig und in kleinen Schritten kreisförmig herum, bis auf dem Bildschirm der Sensor ausgelöst wird. Fixiere den IR-Strahler vorsichtig in dieser Position. Das System sollte weiterhin auf diesem Sensor ein Signal empfangen.
Die grüne Anzeige auf dem Bildschirm geht nach kurzer Zeit aus, aber auch wieder unmittelbar an – bleibt also nicht ununterbrochen an – dieses Verhalten ist ganz normal.
Der so justierte Sensor funktioniert jetzt genau anders herum als die anderen Sensoren, da beim Start des Programmes die Kalibrierung auf den falschen Zustand erfolgte (siehe oben, „Sensoren kalibrieren“).
Durch den Neustart des Programmes wir die Kalibrierung automatisch berichtigt.
Zu 4.:
Die Sensoren und IR-Strahler werden vor dem Versand auf Funktion geprüft. Dennoch lassen sich Fehler nicht immer ausschließen, teilweise entstehen diese auch durch den Einbau.
Sollte ein Sensor nicht funktionieren, so führe folgende Sichtprüfung durch:
DIe Gehäuse der LED’s – insbesondere die zueinander zeigenden Rundungen dürfen nicht mit Kleber verschmiert sein.
Die LED’s müssen klar sein – die Rundungen der LED’s dürfen nicht geschliffen werden, da dies den Lichtdurchfluss behindert.
Die Beinchen der LED’s dürfen sich nicht berühren.
Die IR-Strahler arbeiten im infraroten Bereich, das Licht ist also für das menschliche Auge nicht sichtbar. Daher ist es schwer, einen nicht funktionierenden Strahler zu erkennen.
Bei einem funktionierenden Strahler erkennst du aber ein glimmendes rotes Rechteck, wenn du genau gerade in den Strahler hineinschaust. Der Blick muss dabei gerade durch den LED-Kopf durch die Rundung in den LED gehen.
Die Empfänger kannst du nur indirekt auf Funktion prüfen. Dazu klebe diesen von oben mit etwas undurchsichtigem ab, bzw. unterbreche den Sensorbereich zwischen IR-Strahler und Sensor. Dann starte das Programm und öffne in den Einstellungen die „AT2560 Hardwareeinstellungen“.
Mit einem leitenden Metall verbinde beide beiden Beinchen der Empfänger-LED (3mm) miteinander. Dabei sollte dann im Programm ein Sensorkontakt ausgelöst werden.
Ab der LapTimer-Version 2504-1 besteht die Möglichkeit vor jedem Rennlauf eines Einfahrens. Dies dient zum Kennenlernen der Spur und zur Einstellung des Reglers.
Die Einfahrzeit kann über eine maximale Rundenanzahl oder eine Zeitvorgabe begrenzt werden.
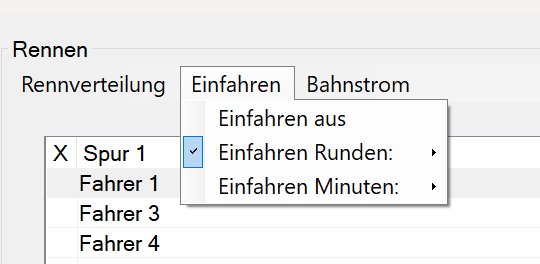
Ein Einfahrfunktion findet sich im Rennmenü oben in der Menüleiste im Punkt „Einfahren“. In diesem Menü stehen die folgenden Menüpunkte zur Verfügung:
Einfahren Aus
Einfahren Runden
Einfahren Minuten
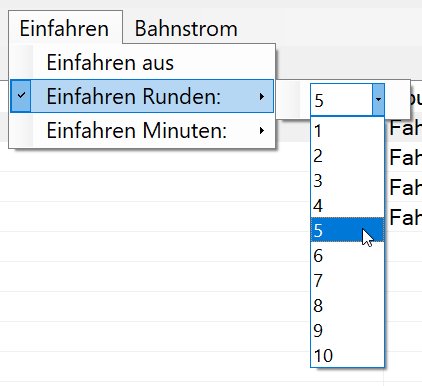
Über die jeweils nächste Menüebene können die Runden und Minuten über ein Dropdownmenü zwischen 1 und 10 eingestellt werden. Abweichende Angaben sind nicht möglich.
Einfahren Aus
Die Einfahrfunktion ist deaktiviert. Die Schaltfläche zum Starten der Einfahrzeit wird im Rennbildschirm nicht eingeblendet.
Einfahren Runden
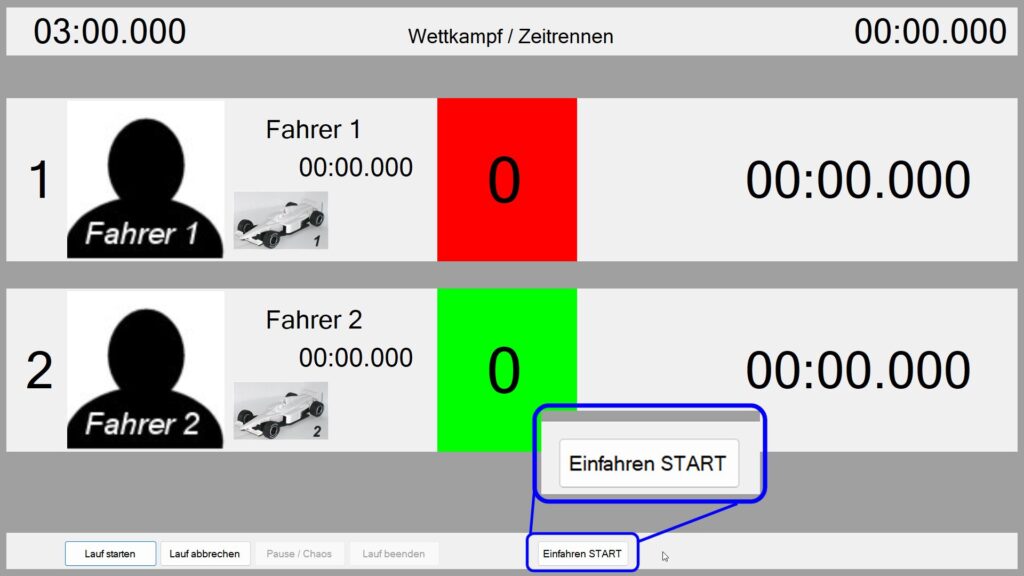
Die Schaltfläche zum Einfahren wird im Rennbildschirm angezeigt. Wird die Einfahrzeit nach Runden gestartet, so wird dies in der Kopfanzeige des Rennbildschirms entsprechend angezeigt. In der Kopfzeile links werden die noch zu fahrenden Runden des Führenden angezeigt, rechts zählt die Uhr die gefahrene Einfahrzeit hoch.
Einfahren Minuten
Die Schaltfläche zum Einfahren wird im Rennbildschirm angezeigt. Wird die Einfahrzeit nach Minuten gestartet, so wird dies in der Kopfanzeige des Rennbildschirms entsprechend angezeigt. In der Kopfzeile links werden die noch zu fahrenden Minuten und Sekunden angezeigt, rechts zählt die Uhr die gefahrene Einfahrzeit hoch.
Allgemeine Hinweise:
Die schnellste Rundenzeit wird beim Einfahren nicht angezeigt.
Die Runden zählen direkt ab der ersten Sensorüberfahrt.
Die Chaosfunktion ist beim Einfahren nicht verfügbar.
Nach Ablauf der Einfahrzeit nach Minuten wird das Einfahren direkt gestoppt.
Der Bahnstrom wird am Ende der Einfahrzeit ausgeschaltet und nach Bestätigung des Informationsfensters wieder eingeschaltet.
Der Lauf kann auch ohne ein Einfahren gestartet werden.
Die Einfahrzeit kann nach Ablauf erneut gestartet werden.
Eine Verbrauchsberechnung findet im Analogmodus nicht statt.
Im Digitalmodus mit aktivierter Tankfunktion wird auch beim Einfahren der Verbrauch abgezogen. Zum Start des Laufes werden die Tanks wieder gefüllt.
Die Einfahrzeit wird im Rennbildschirm über die Schaltfläche „Einfahren START“ gestartet.
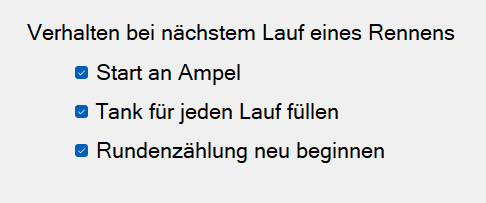
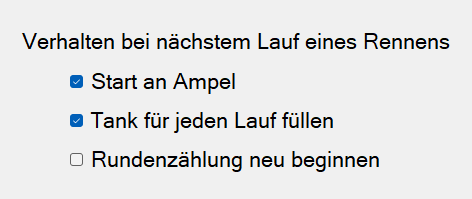
Diese Einstellungen steuern das Verhalten bei Rennen, in denen die Fahrer mehrere Läufe absolvieren. Im Einzelrennen, auch wenn das Einzelrennen aus mehreren Läufen besteht, sind diese Einstellungen ohne Auswirkungen.
In den Standardeinstellungen sind alle drei Funktionen aktiviert!
Rundenzählung neu beginnen
Ist diese Option aktiviert, so beginnt für jeden Lauf des Fahrers beginnt die Rundenzählung bei 0. Die Rennrunden jedes Laufes werden separat gezählt und werden erst zur Endauswertung addiert. In der Detailansicht der Auswertung sind die weiter einzeln sichtbar.
Wird diese Option deaktiviert, so wird die Rundenzählung über jeden Lauf des Fahrers weiter hochgezählt. Endet der erste Lauf mit 8 Runden, so beginnt die Zählung des nächsten Laufes nicht bei 0, sondern bei 8 Runden.
So werden über jeden Lauf die Runden eines Rennens bereits im laufenden Rennen summiert angezeigt.
Diese Einstellungen steuern das Verhalten bei Rennen, in denen die Fahrer mehrere Läufe absolvieren. Im Einzelrennen, auch wenn das Einzelrennen aus mehreren Läufen besteht, sind diese Einstellungen ohne Auswirkungen.
In den Standardeinstellungen sind alle drei Funktionen aktiviert!
Tank für jeden Lauf füllen
Für Rennen ohne Tankfunktion ist diese Option unbeachtlich. Diese Option sorgt dafür, das jeder Rennlauf mit einem vollen Tank begonnen wird. Bei Digitalbahnen ist diese Option nicht ausschaltbar, da bei einem Rennstart stets der Tank durch die ControlUnit neu befüllt wird.
Wird diese Option deaktiviert, so wird bei einem neuen Lauf der Tankstand des Fahrzeugs erhalten. Der Tankstand ist an das Fahrzeug gebunden, nicht an den Fahrer. Der Fahrer kann daher einen Tankstand nicht auf ein neues Fahrzeug übertragen (bei Spurbindung der Fahrzeuge).
Auswirkung der Fahrzeugbindung (Spur oder Fahrer):
Rennen mit Fahrzeugbindung: Zuordnung Fahrer
Das Fahrzeug ist an den Fahrer gebunden. Wechselt der Fahrer die Spur, so wechselt das Fahrzeug mit. Der reduzierte Tankstand des Fahrzeugs verbleibt dabei, ebenso wie das Auto beim bisherigen Fahrer.
Rennen mit Fahrzeugbindung: Zuordnung Spur
Das Fahrzeug ist an die Spur gebunden. Wechselt der Fahrer zum nächsten Lauf die Spur, so verbleibt das Fahrzeug auf der bisherigen Spur. Der reduzierte Tankstand des Fahrzeugs bleibt erhalten, sodass der neue Fahrer dieses Fahrzeugs mit diesem Tankstand weiterfahren muss.
Diese Einstellungen steuern das Verhalten bei Rennen, in denen die Fahrer mehrere Läufe absolvieren. Im Einzelrennen, auch wenn das Einzelrennen aus mehreren Läufen besteht, sind diese Einstellungen ohne Auswirkungen.
In den Standardeinstellungen sind alle drei Funktionen aktiviert!
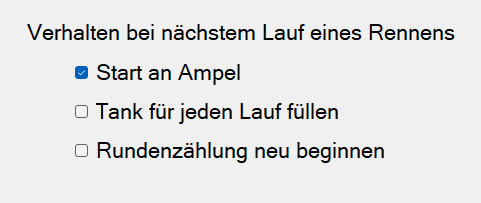
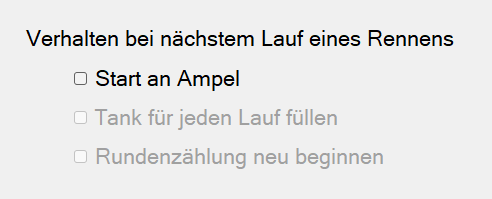
Start an Ampel
Ist diese Funktion aktiviert, so startet jeder Lauf eines Fahrers an der Startampel. D.h. die jeweils erste Sensordurchfahrt des Start-/Zielsensors wird nicht als Runde gezählt.
Ist diese Funktion deaktiviert, so wird auch die erste Sensordurchfahrt eines neuen Laufes als Runde gezählt.
Diese Funktion sollte also im Grundsatz aktiviert sein. Sollen jedoch die weiteren Läufe Fahrers nicht an der Startlinie, sondern an der zuletzt erreichten Position gestartet werden, so ist diese Funktion auszuschalten.
Das deaktivieren dieser Funktion deaktiviert auch zwangsweise die Funktion Tank für jeden Lauf füllen und Rundenzählung neu beginnen.
Beispiel:
Zeitrennen 3 Minuten, 2 Spuren, 4 Fahrer Fahrer 1 beginnt auf Spur 1 und schafft 8,5 Runden. Der Bahnstrom wird unmittelbar abgeschaltet, ohne dass die Fahrer die angefangenen Runden beenden. Für den nächsten Lauf bleibt das Fahrzeug an der erreichten Position auf die neue Spur gestellt und das Rennen wird ab dieser Position fortgeführt. Daher ist für die nächste Sensordurchfahrt nach Laufstart unmittelbar eine Runde zu Zählen. Mit aktivierter Einstellung „Rundenzählung neu beginnen“ wird diese als Runde 1 gezählt, mit deaktivierter Einstellung „Rundenzählung neu beginnen“ als Runde 9.
Auf diese Art kann ein Rennen über einen Laufwechsel hinaus mit fortlaufender Zählung geführt werden.
Eine Frühstarterkennung mit analogen Bahnen ist beim Start auf der Strecke nicht möglich. Sinnvoll für diesen Rennmodus ist zudem die Fahrzeugbindung an den Fahrer.
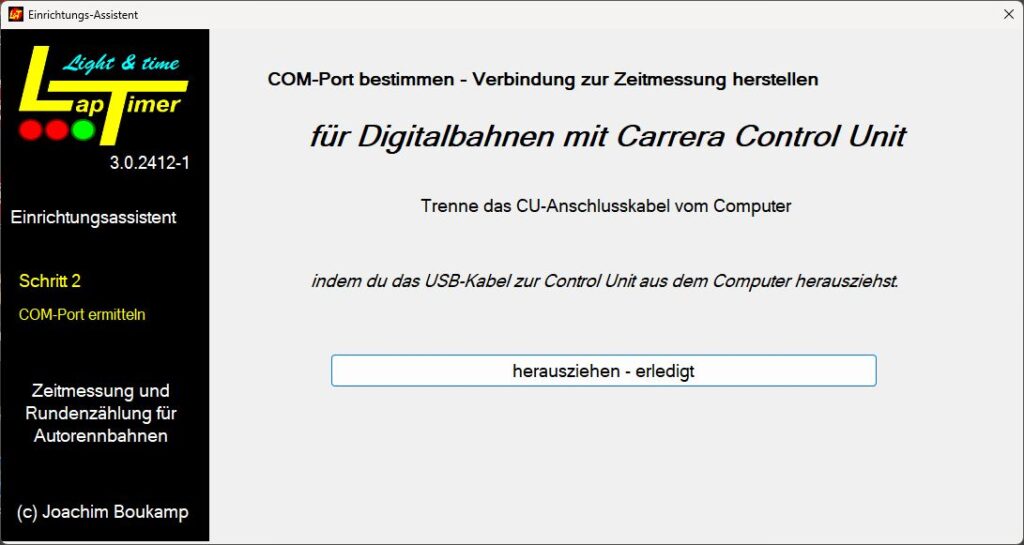
Für eine digitale Carrera D124/ D132 Rennbahn wähle im Einrichtungsassistenten „digital mit der Carrera ControlUnit“ aus. Anschließend startet der Einrichtungsassistent die Abfrage des COM-Ports. Folge dazu den Anweisungen auf dem Bildschirm:
1. Bestätige den Beginn mit der Schaltfläche „Bestätige!“
2. Falls das L&T CU Anschlusskabel angeschlossen ist trenne diese. Danach bestätige mit der Schaltfläche „herausziehen – erledigt“.
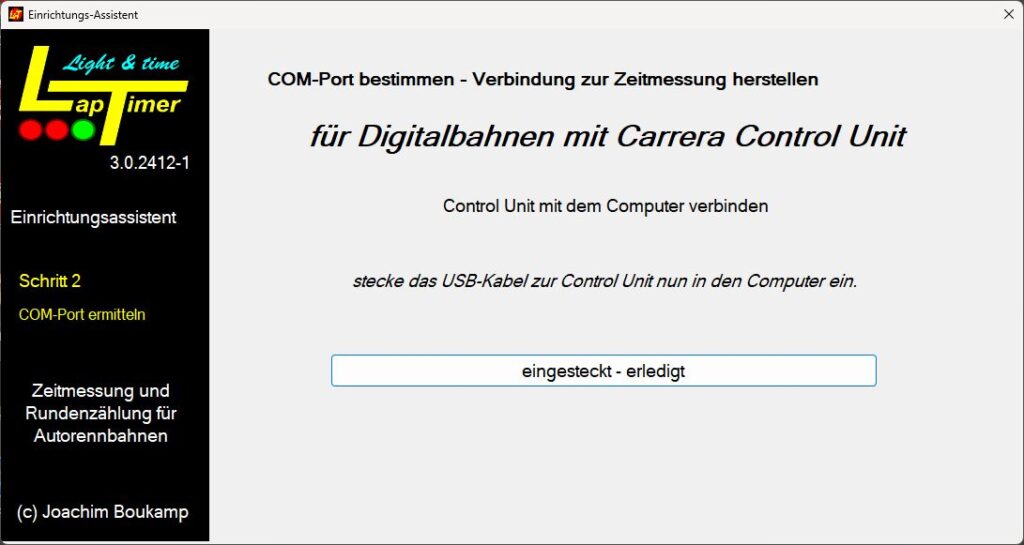
3. Wenn du dazu aufgefordert wirst verbinde das Kabel wieder mit dem PC. Danach bestätige mit der Schaltfläche „eingesteckt – erledigt“.
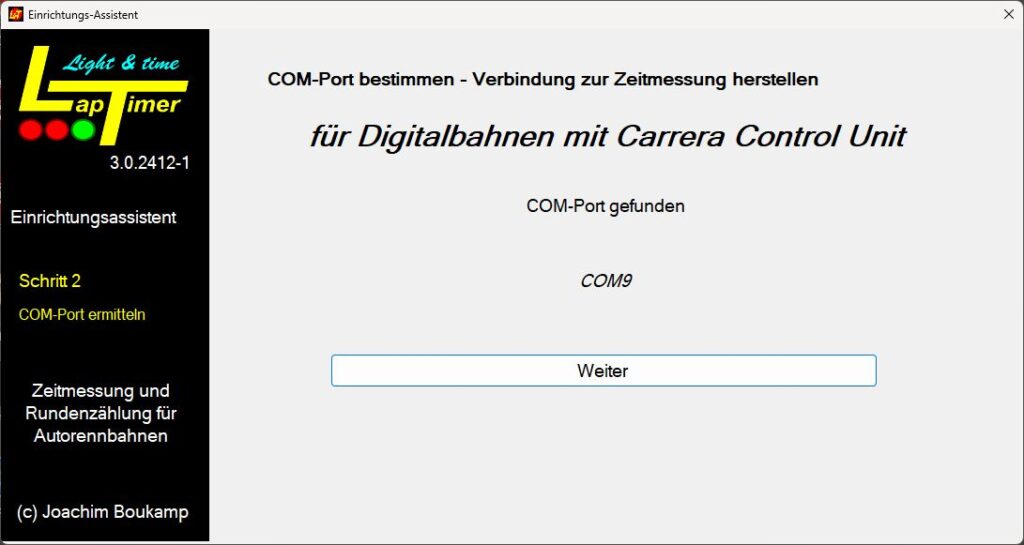
Hinweis: Die USB-Verbindung vom PC zur ControlUnit wird über einen virtuellen COM-Port gesteuert. Für diesen muss eine eindeutige Nummer (COM-Port Nummer) vergeben sein, unter welcher der PC die Messhardware erreichen kann. Diese Nummer unterscheidet sich von PC zu PC und von USB-Steckplatz zu USB-Steckplatz. Achte daher darauf, immer die selbe USB-Buchse zu verwenden.
Der gefundene COM-Port wird anschließend angezeigt und mit „Weiter“ wird die Einrichtung beendet.
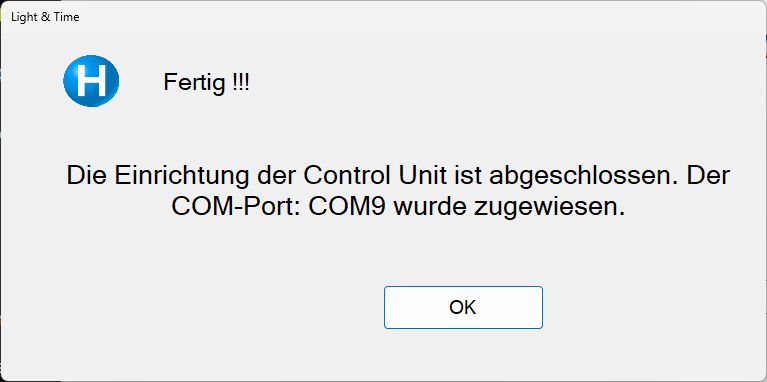
Über die Schaltfläche „OK“ wird die Einrichtung abgeschlossen und das Programm mit dem Menüpunkt „Strecke“ gestartet.
Hinweis: Der gefundene COM-Port kann in den Einstellungen auch manuell verändert werden. Zudem kann in den Einstellungen das CU-Einstellungsfenster geöffnet werden, in dem sich die Verbindung zur ControlUnit testen lässt.
Aufgrund der gebrauchten Zeit wird, im Vergleich zu den hinterlegten Standardwerten von L&T der fiktive Spritverbrauch errechnet und beim Passieren der Sensoren abgezogen. Die Tankanzeige verändert sich also nur beim Überfahren eines Rundenzählsensors. Sollte dabei ein Tank ganz leer werden, so wird dem Fahrer eine Strafe zugewiesen (ist eine Bahnstromabschaltung vorhanden, so kann bspw. der Bahnstrom für die Strafdauer ausgeschaltet werden, sodass das Fahrzeug stehen bleibt. Daher muss rechtzeitig nachgetankt werden.
Im Folgenden zeige ich die Sensoranordnung für eine Rundenzählung/ Zeitmessung und Tankfunktion in der Boxengasse.
Der Tankvorgang beginnt nach einer kurzen Wartezeit, wenn der „Tanksensor ein“ ausgelöst wurde und dauert so lange an, bis der Tank voll ist oder der „Tanksensor aus“ überfahren wird.
Im normalen Rennablauf überfährt man den Tanksensor aus so schnell, dass der Tankvorgang nicht begonnen wird. Erst wenn man zwischen den Sensoren anhält vergeht genügend Zeit, dass der Tankvorgang beginnen kann.
Benötigt werden je Spur mindestens 3 Sensoren.
Tanken in der Boxengasse
Mit den zwei Sensoren je Spur wird in der Boxengasse ein Tankbereich geschaffen, in dem das Fahrzeug zum Stehen kommen kann. Der Tankbereich wird durch den „Tanksensor ein“ als Tankbereichsanfangssensor und dem „Tanksensor aus“ als Tankbereichsendesensor begrenzt.
Der erste Sensor in der Boxengasse hat dabei eine Doppelfunktion, denn er wird als Rundenzählsensor und Tanksensor benötigt.
Die Länge des Tankbereichs kann frei gewählt werden und kann sich an den eigenen Fähigkeiten orientieren. Anspruchsvoll wird das Anhalten in einem Tankbereich in Wagenlänge. Mehr als eine ganze Gerade als Tankbereich ist selten erforderlich.
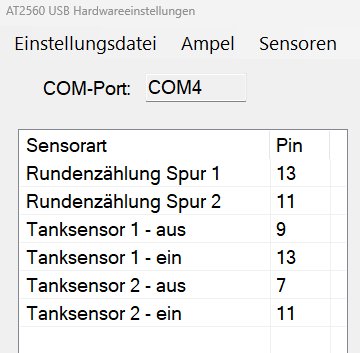
Als Pin-Nummern wurden die Standardpins der Hardware 7, 9, 11, 13, 10 und 12 verwendet. Die Pin-Nummern können je nach Sensorplatzierung bei dir abweichen.
Aufgrund der gebrauchten Zeit wird, im Vergleich zu den hinterlegten Standardwerten von L&T der fiktive Spritverbrauch errechnet und beim Passieren der Sensoren abgezogen. Die Tankanzeige verändert sich also nur beim Überfahren eines Rundenzählsensors. Sollte dabei ein Tank ganz leer werden, so wird dem Fahrer eine Strafe zugewiesen (ist eine Bahnstromabschaltung vorhanden, so kann bspw. der Bahnstrom für die Strafdauer ausgeschaltet werden, sodass das Fahrzeug stehen bleibt. Daher muss rechtzeitig nachgetankt werden.
Im Folgenden zeige ich die Sensoranordnung für eine Rundenzählung/ Zeitmessung und Tankfunktion auf der Strecke, also ohne Bexengasse.
Der Tankvorgang beginnt nach einer kurzen Wartezeit, wenn der „Tanksensor ein“ ausgelöst wurde und dauert so lange an, bis der Tank voll ist oder der „Tanksensor aus“ überfahren wird.
Im normalen Rennablauf überfährt man den Tanksensor aus so schnell, dass der Tankvorgang nicht begonnen wird. Erst wenn man zwischen den Sensoren anhält vergeht genügend Zeit, dass der Tankvorgang beginnen kann.
Benötigt werden je Spur 2 Sensoren.
Tanken zwischen zwei Sensoren
Mit den zwei Sensoren je Spur wird ein Tankbereich geschaffen, in dem das Fahrzeug zum Stehen kommen kann. Der Tankbereich wird durch den „Tanksensor ein“ als Tankbereichsanfangssensor und dem „Tanksensor aus“ als Tankbereichsendesensor begrenzt.
Der erste Sensor in Fahrtrichtung hat dabei eine Doppelfunktion als Rundenzählsensor und Tanksensor ein.
Die Länge des Tankbereichs kann frei gewählt werden und kann sich an den eigenen Fähigkeiten orientieren. Anspruchsvoll wird das Anhalten in einem Tankbereich in Wagenlänge. Mehr als eine ganze Gerade als Tankbereich ist selten erforderlich.
Als Pin-Nummern wurden die Standardpins der Hardware 7, 9, 11 und 13 verwendet. Die Pin-Nummern können je nach Sensorplatzierung bei dir abweichen.
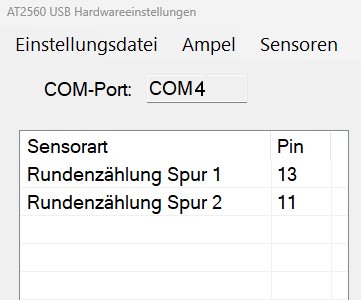
Mit der L&T AT-2560 USB-Box stehen genügend Anschlüsse zur Verfügung, um eine Bahn mit Boxengasse und allen Funktionen aufzubauen. Im Folgenden zeige ich die Sensoranordnung für eine einfache Rundenzählung und Zeitmessung, bei der man je Spur einen Sensor benötigt.
Einfacher Zählsensor, ohne Tankfunktion
Diese einfachste Version dient lediglich der Rundenzählung und Rundenzeitmessung. Die Tankfunktion its mit dieser Sensorausstattung nicht möglich, eine spätere Erweiterung um weitere Tanksensoren ist aber möglich.
Zur Rundenzählung und Rundenzeitmessung wird je Spur ein Sensor in die Bahn eingebaut und an der USB-Box angeschlossen. Für die Sensoren ist in der Software jeweils die Funktion „Rundenzählung Spur …“ für den jeweiligen Eingangspin (Standard Pin 13 und Pin 11) der Hardware einzurichten. Alternativ kann der Einrichtungsassistent genutzt werden.
So definiert werden beim Auslösen des Sensors die Runden hochgezählt und die Rundenzeit ermittelt.